
'산대특' 카테고리의 다른 글
| [애드몹] 배너 광고 붙이기 (0) | 2024.06.28 |
|---|---|
| 플레이콘솔 리더보드에 점수 올리기 (0) | 2024.06.26 |
| 2D 3Matchpuzzle - 블록 위치 찾기 테스트 (0) | 2024.05.16 |
| 2D 3Matchpuzzle - 빈공간 찾기 (0) | 2024.05.14 |
| Download Python (0) | 2024.05.08 |
| [애드몹] 배너 광고 붙이기 (0) | 2024.06.28 |
|---|---|
| 플레이콘솔 리더보드에 점수 올리기 (0) | 2024.06.26 |
| 2D 3Matchpuzzle - 블록 위치 찾기 테스트 (0) | 2024.05.16 |
| 2D 3Matchpuzzle - 빈공간 찾기 (0) | 2024.05.14 |
| Download Python (0) | 2024.05.08 |
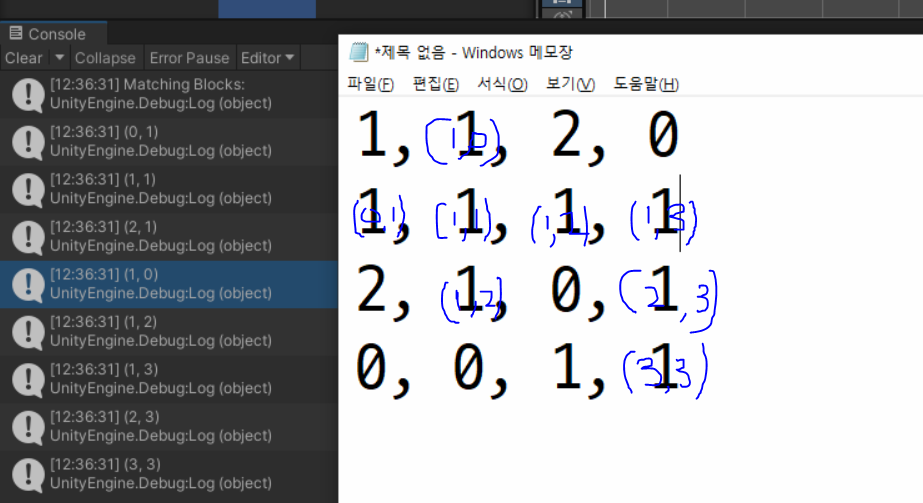
완전 탐색을 하여 2중 for문을 돌린다
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class MatchTest : MonoBehaviour
{
private static readonly int Rows = 4;
private static readonly int Cols = 4;
private int[,] board =
{
{1, 1, 2, 0},
{1, 1, 1, 1},
{2, 1, 0, 1},
{0, 0, 1, 1}
};
void Start()
{
FindMatchingBlocks();
}
private void FindMatchingBlocks()
{
HashSet<(int, int)> matchedBlocks = new HashSet<(int, int)>();
for (int i = 0; i < Rows; i++)
{
for (int j = 0; j < Cols; j++)
{
CheckHorizontalMatch(i, j, matchedBlocks);
CheckVerticalMatch(i, j, matchedBlocks);
}
}
Debug.Log("Matching Blocks:");
foreach (var block in matchedBlocks)
{
Debug.Log($"({block.Item1}, {block.Item2})");
}
}
private void CheckHorizontalMatch(int row, int col, HashSet<(int, int)> matchedBlocks)
{
if (col + 2 < Cols &&
board[row, col] == board[row, col + 1] &&
board[row, col] == board[row, col + 2])
{
matchedBlocks.Add((row, col));
matchedBlocks.Add((row, col + 1));
matchedBlocks.Add((row, col + 2));
}
}
private void CheckVerticalMatch(int row, int col, HashSet<(int, int)> matchedBlocks)
{
if (row + 2 < Rows &&
board[row, col] == board[row + 1, col] &&
board[row, col] == board[row + 2, col])
{
matchedBlocks.Add((row, col));
matchedBlocks.Add((row + 1, col));
matchedBlocks.Add((row + 2, col));
}
}
}| 플레이콘솔 리더보드에 점수 올리기 (0) | 2024.06.26 |
|---|---|
| 2D 3Matchpuzzle - 매치 시 파괴 및 로드 + 힌트 (0) | 2024.05.20 |
| 2D 3Matchpuzzle - 빈공간 찾기 (0) | 2024.05.14 |
| Download Python (0) | 2024.05.08 |
| Learn Firebase (0) | 2024.05.02 |